


(1)獨(dú)特な真空プレートシステムで、ロールエッジ外板ワークの吸著位置決めを強(qiáng)化し、ロボットと外板位置決め機(jī)構(gòu)の論理待ち?xí)r間を減少する、
(2)分離型金型と分割ロールの方式を採(cǎi)用し、より小さい場(chǎng)所を用いてより多くの車種の柔軟性化と高効率生産を?qū)g現(xiàn)する、
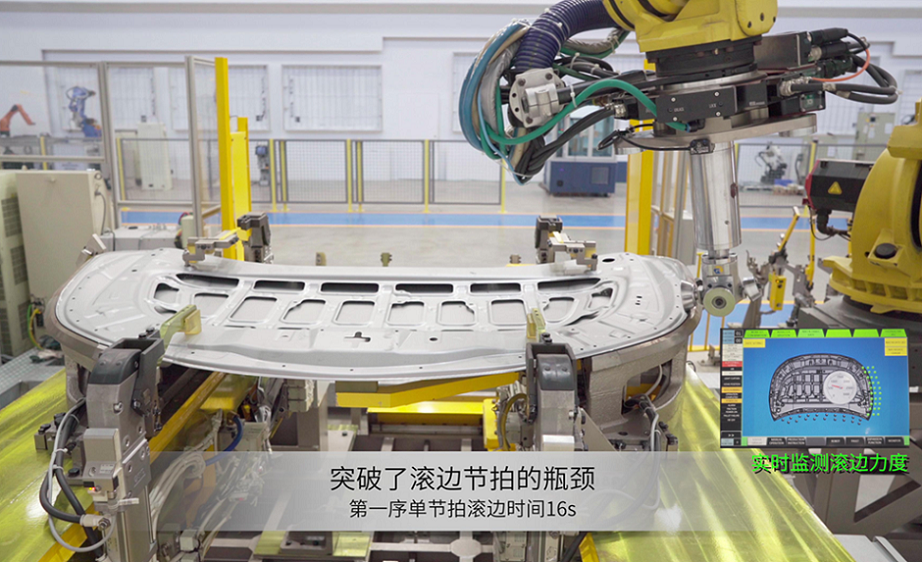
(3)自主開(kāi)発の高速ロールツールを用いて真空板システムに合わせ、ロボットロール速度を高め、ロール回?cái)?shù)を減らし、より高いタクトと効率を?qū)g現(xiàn)する。
技術(shù)的特徴:






