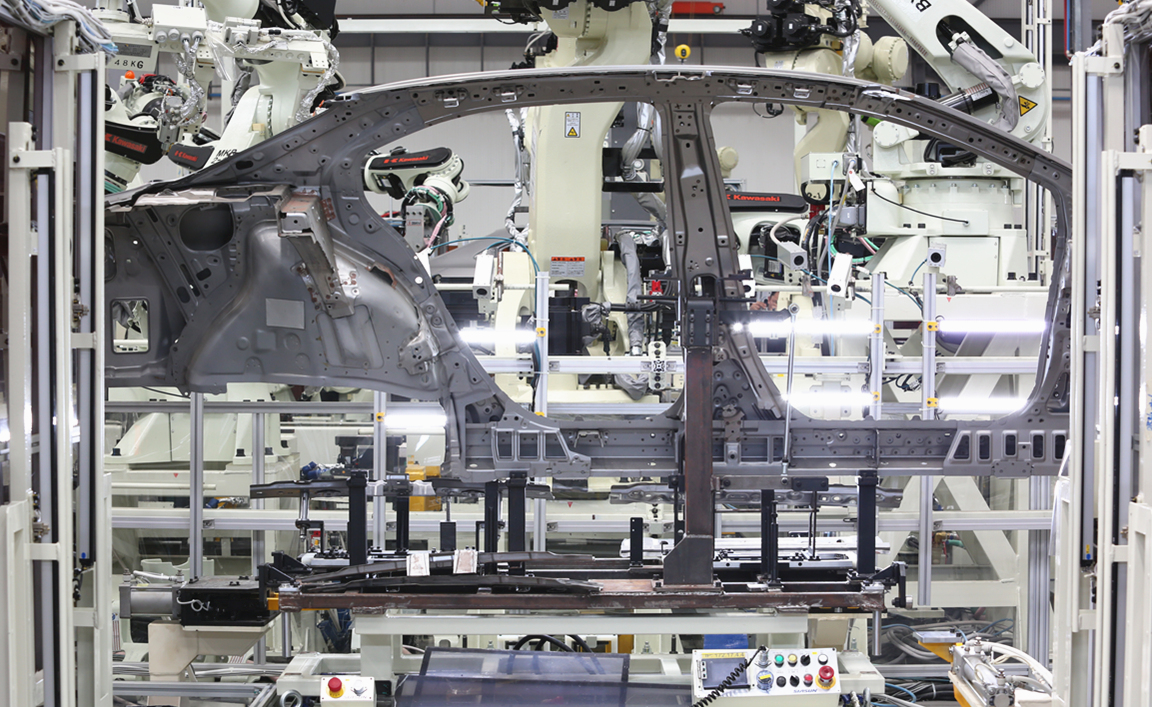




3D激光視覺尋位系統(tǒng)主要由3D激光器、工控機及視覺軟件組成,由機器人帶著3D激光器到達指定的位置拍照,視覺軟件進行圖像運算將得到的工件偏差值發(fā)送給機器人,最終引導機器人自動糾偏后準確抓取工件。3D激光器包含3D激光功能和2D拍照功能,3D激光功能基于三角光切法原理,利用線性激光束獲取被測特征的高度、傾斜及旋轉(zhuǎn)量,結(jié)合2D拍照功能找到特征的中心,從而確定整個工件相對于標準件的偏差值。該系統(tǒng)的激光器局部成像,一般需要多套,適用于各類生產(chǎn)線的超大工件(如汽車側(cè)圍件)的物料搬運、抓取等項目需求。